
Laser scanning of terrain represents one of the most modern technologies used for mass acquisition of spatial data in the form of coordinate points in space using a laser.
Laser (Light Amplification by Stimulated Emission of Radiation) is a source of light radiation that emits a coherent beam of photons, which is as a source stable in frequency, length and intensity.
LiDAR technology is based on collecting three different sets of data. Sensor position is determined by application of Global Positioning System (GPS), using phase measurements in a relative cinematics mode, while orientation is determined using Inertial Measurement Unit (IMU). The last component is a laser scanner that emits an infrared beam towards the ground, which is reflected towards the sensor. The time that has passed from emission to the reception of the signal, with knowledge of sensor position and orientation, enables precise calculation of three-dimensional coordinated on Earth.
Laser scanning technology LiDAR (Light Detection and Ranging) represents one of the fastest growing technologies in procedures for collection and processing of spatial information. The other name for LiDAR is light radar or laser radar. LiDAR operates in a similar way as a radar and sonar, only it uses light waves of the laser instead of radio waves or sound waves.
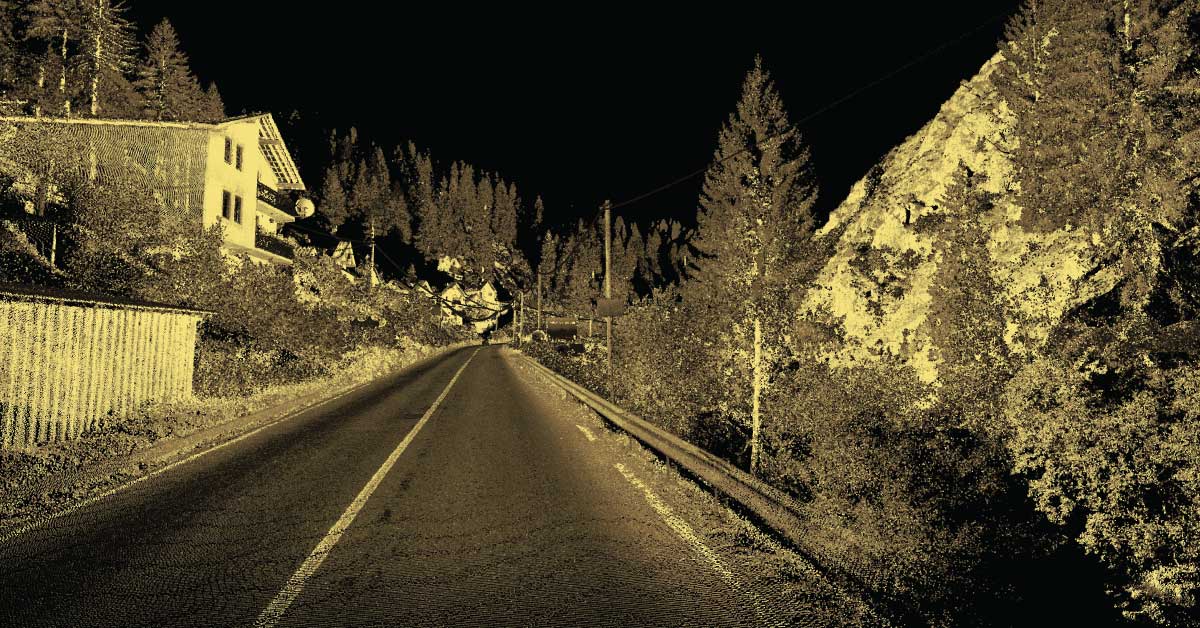
Scanning is done using the already known method of measuring distance and angle to a certain point in the surveyed area. Result of this kind of survey is a set of three-dimensional X, Y, Z coordinate points called point cloud. One of the main advantages is collection, processing and delivery of data in digital format. Point cloud is most often saved in ASCII format (XZY RGBI). Point cloud can be loaded in numerous specialised software tools and GIS applications (PointTools, MicroSurvey CAD, MicroStation, ArcGIS). The main shortcoming in the processing process in commercial packages is the limitation on the number of loaded points.
Spatial distance between neighbouring recorded points within the cloud depends on the distance from the object of recording and technical specification of the instrument. Based on RGB components acquired by integrated high-resolution cameras, it is possible to colour the point cloud to create a complete three-dimensional visual impression of the terrain that completely matches the real environment. Important information are obtained regarding all natural and artificial forms of terrain (structures, vegetation), based on which a Digital Elevation Model (DEM) can be created.
Spatial laser scanning technology, depending on the platform it uses, is divided on:
- airborne laser scanning
- terrestrial laser scanning
Airborne Laser Scanning (ALS) — airborne laser scanning consists of laser scanner, IMU and GPS mounted on an aircraft – helicopter, airplane or unmanned aircraft. This system produced point cloud that contains X, Y, Z coordinates of the scanned area. The advantage of using ALS is that is provides a map of a wide area in a short period of time, saving money, without losing the accuracy of measurement.

Terrestrial Laser Scanning (TLS) – Terrestrial laser scanning happens on the Earth’s surface. Terrestrial laser scanning is a version of airborne laser scanning (ALS) only on the ground. By processing data, output products are obtained and they are very practical to use and can be in formats that enable conventional methods of survey. Stationary terrestrial scanning is most often used for the purpose of conventional topography, monitoring, cultural heritage preservation… These scanners, which were originally developed for modelling of as-built condition of architectural and engineering structures, can also be used for high-resolution mapping of terrain, vegetation and other topographic details from a limited distance in the range of 800 m. They are capable of providing dense set of distance values that can be transformed into a highly detailed, digital 3D model of topography that can be transformed in DEM in GIS.

Mobile Laser Scanning (MLS) represents scanning using a scanner mounted on a moving vehicle that collects data on its path. These scanners are coupled with other types of equipment, using GNSS receivers and IMU. One example of its use is survey of streets where electric power lines, exact height of bridges, boarder trees and similar details, play an important part. Instead of measuring each detail separately on site in a traditional way, a 3D model is produced via point cloud in which all measurements can be performed depending on the quality of acquired data. MLS offers several advantages over traditional methods of measuring corridors, including high speed of data acquisition (reduced time and costs), large density of acquired data in the form of point cloud, so that the details cannot be omitted, extensive topographic surveys, minimalization of errors and inquiry data, remote acquisition and measurement (increased efficiency and safety of measurement) and the data can be delivered in the form of coloured 3D point cloud for accurate representation of topographic elements.
Other services

BIM is a resource for sharing knowledge and information regarding a building, thus forming a reliable decision-making base during its entire lifecycle.

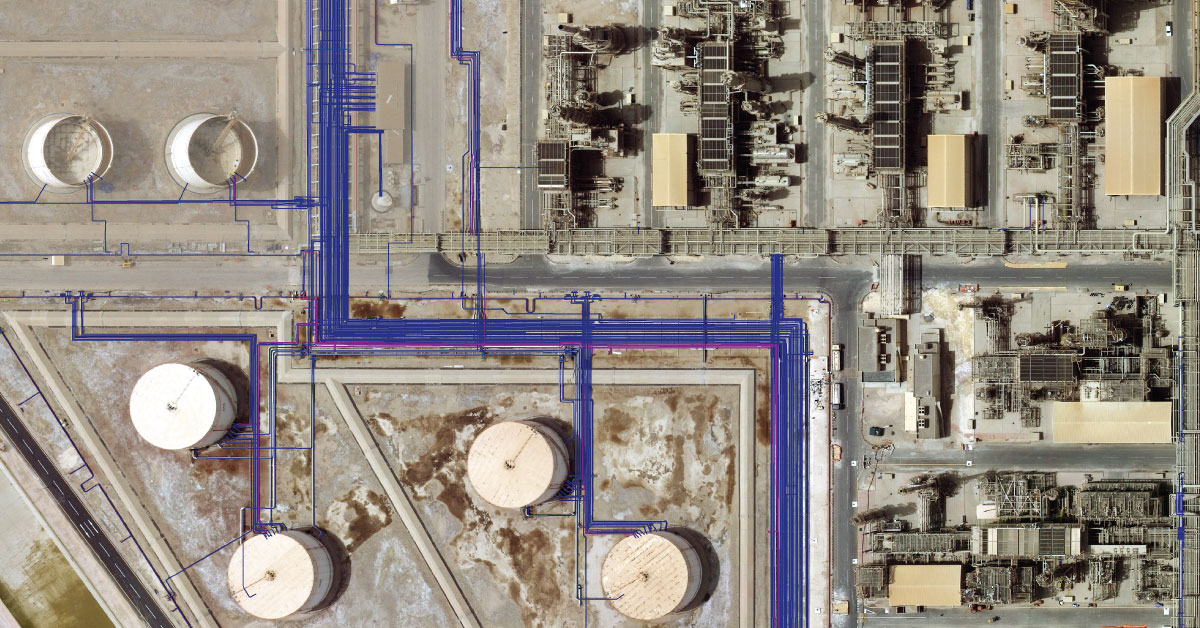
Detection of underground installations have become critical functions done before any other works. As our infrastructure network grows, the density of cables, pipelines and other installations grows as well.
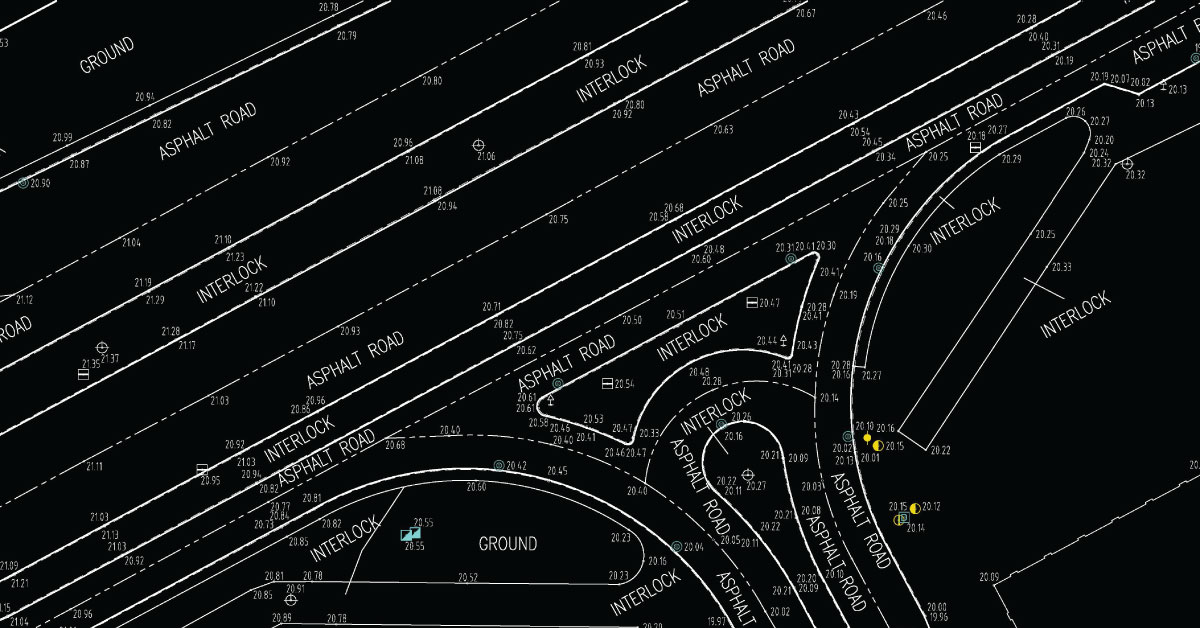
Digital topography represents geometric representation of spatial forms mapped according to corresponding geodetic and cartographic standards.

Geodesy is a scientific discipline concerned with measuring and representing Earth, its gravitational field and geodynamical phenomena, such as: pole shifts, tides and movement of tectonic plates.
In a narrow sense, GIS is a computer system capable of integration, storage, editing, analysis and display of information related to spatial location.
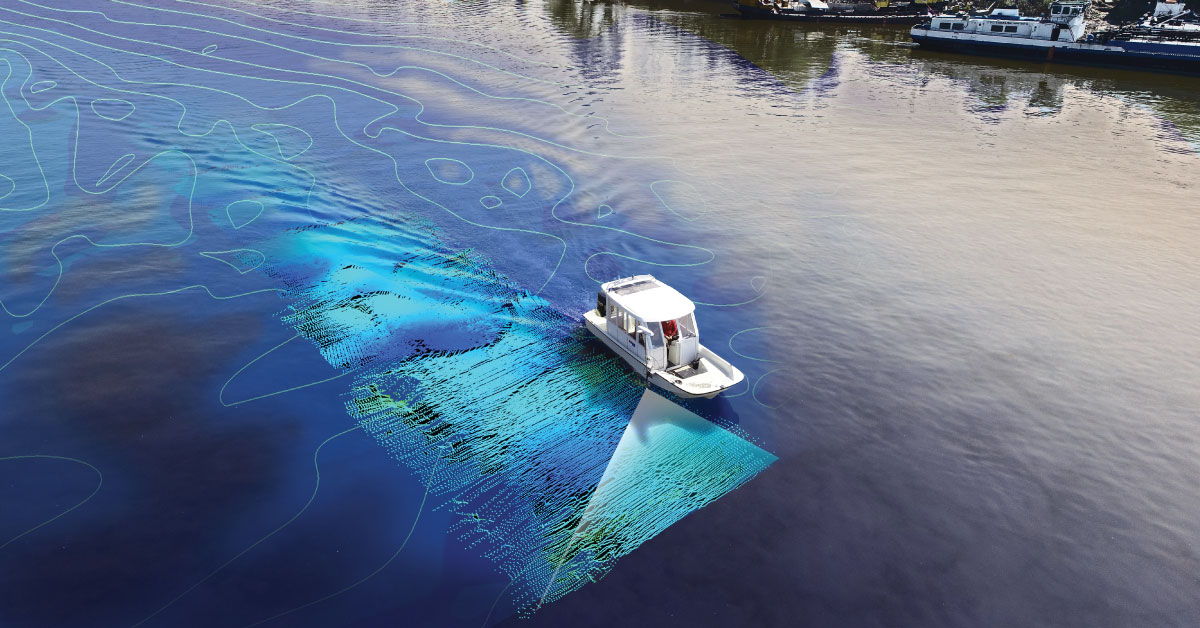
It is a branch of applied sciences concerned with measurement and description of physical characteristics of oceans, seas, coastal areas, lakes and rivers, as well as forecasting their changes over time.

Land consolidation represents formation of larger agricultural parcels and reallocation of their ownership, whereby the number of parcels decreases and cultivation of more regular parcels is enabled.

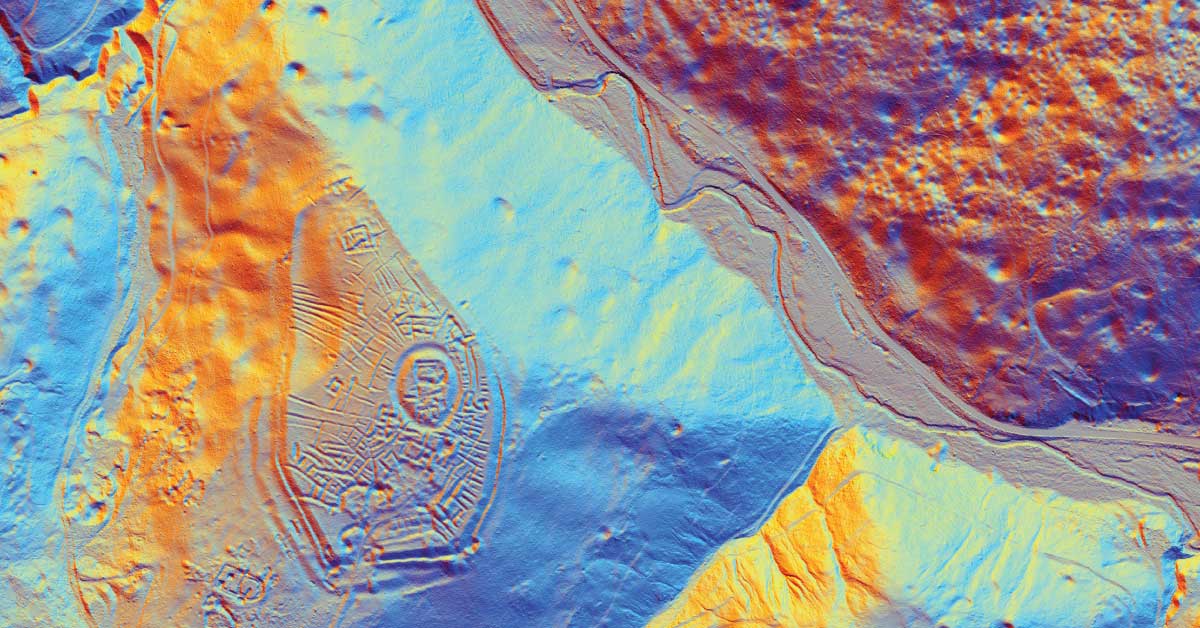
LiDAR is being used to lead a revolution in archaeology transforming how scientists understand human activity of the past.

The aim of photogrammetry is to obtain precize information regarding relief, topography of Earth’s surface, and its objects, for the purpose of producing geographic, topographic maps and plans, or 3D models.
Remote sensing represents mass geospatial data acquisition technology using systems that are not in direct physical contact with the investigated phenomenon or object .
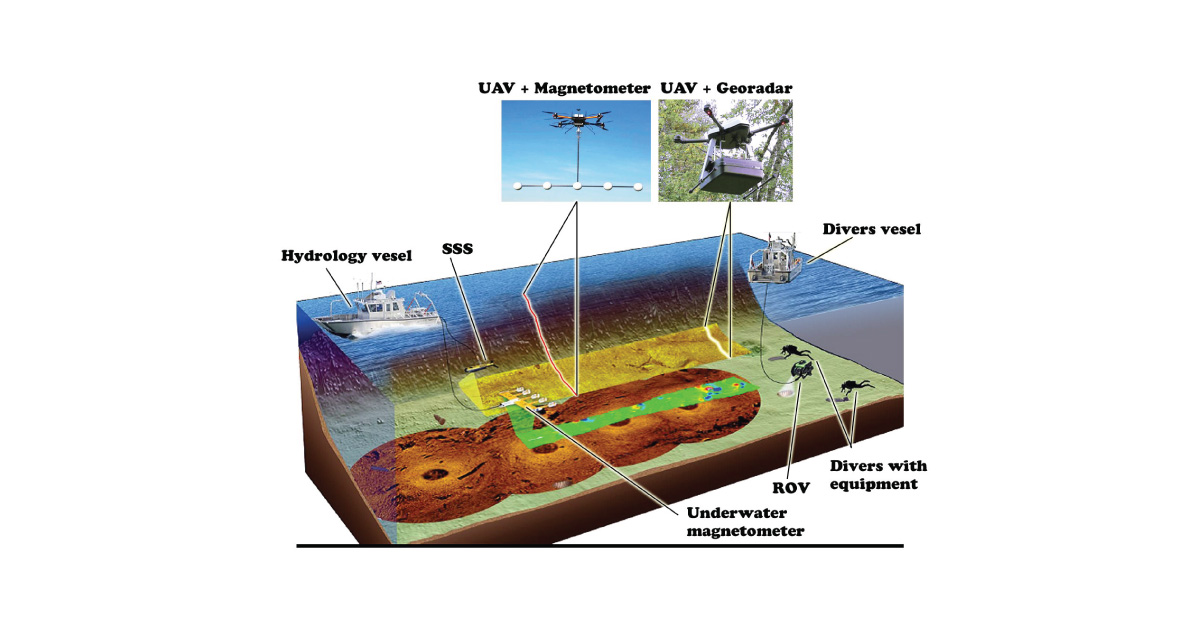
(UXO) includes bombs, explosive devices left over from wars, explosive weapons that didn’t explode at the time they were placed and that still remain and pose a risk of detonation.